Универсальная грузовая платформа 0.5
Рассмотрим более подробно уже применительно к практической реализации. Для этого будем использовать малоразмерный проект Универсальной грузовой платформы 0.5.
Начну устройство с системы управления. Система управления основана на контроллере Arduino. Это очень удобно при проектирования, когда не знаешь что может понадобиться. Я использую Arduino Mega 2650 с шитом для 3д принтера RAMS 1.4. Данная связка позволяет получить подключить сразу 5 шаговых двигателей. Если нужно больше это не проблема так как есть очень много свободных пинов. Можно использовать UNO c щитом CNC 3 вер. 4. там доступно 4 драйвера но очень мало выводов.
Основным приводом будут использоваться шаговые двигатели. Они обладают большой стартовой мощностью и точным количеством оборотов, которые можно задать. Поэтому достаточно иметь один концевик для фиксации начального положения. После чего можно задать сделать необходимое количество оборотом и если не будет не каких препятствий то он их сделать. Для работы с шаговым двигателем необходим драйвер который будет им управлять. Драйверы необходимо использовать согласно их мощности. Так же можно поставить дополнительно датчики тока что бы понимать когда двигатель работает с большой нарезкой и вовремя его отключить что бы не привести конструкцию к разрушению.
Концевики. Для успешной работы и понимания в какой позиции находится механизм. Что бы иметь полны контроль на механизмом концевики нужно использовать на каждой ключевой точки его движения. Но это не очень удобно. Использования шагового двигателя позволяет использовать минимум концевиков. Но надо помнить что если нагрузка будет чрезмерна то шаговый двигатель начнет проскальзывать (стучать). Концевики могут быть как механические (контактные), так и без контактные. Без контактные использовать предпочтительнее но не всегда возможно.
Контроллер станции управляется посредством кодов. Подключение осуществляется через последовательный порт на скорости которая задана прошивкой контроллера. К параллельному порту можно подключится либо к компьютером либо Arduino с wifi для беспроводного доступа. Управление происходит с использованием команд кода. Список команд доступных для пользователя приведён здесь. Так же контролер сообщает о своем состоянии выполнении команд и возможных ошибках. Данные сообщения так же могут хранится дополнительных программах которые работую со станцией.
Демонстрация работы модели. Используется вокс для рамы 250.
На данном видео хорошо видно как работает механизм грузовой станции. Основными механизмами являются крутящая вокруг своей оси карусель и движущийся вверх в низ подъёмник. Карусель обеспечивает подачу и забивания груза с подъемника. Подъемник обеспечивает прием и погрузку груза и аккумулятора с дрона.
Работает это все следующим образом. Прилетает дрон. Садится на платформу. После механизмом позиционирования дрон устанавливается над окном приема и фиксируется на площадке. Одновременно с фиксацией на площадке открывается окно примеа груза. После этого подъемник поднимается под груз для приема груза. На дроне опускается фиксатор груза в грузовом контейнере и груз ложится на лапу подъемника. После чего подъемник опускается вниз и ложет груз на лепесток карусели. Карусель поворачивается и над подъемником останавливается лепесток свободный от груза для приме батареи. После подъемник поднимается вверх и принимает уже батарею дрона для замены и опускает её на липесток. Карусель снова поворачивается и на этот раз на нем лежит заряженная батарея. Подъемник поднимает эту батарею в дрон где она фиксируется батарейном отсеке фиксаторами батареи. После опускания подъемника карусель поворачивается ещё раз и над подъемником уже будет находится груз необходимый к перевозке. После чего груз поднимается и фиксируется в дроне в грузовом отделе. После чего подъёмник опускается в низ на свое фиксированное место в самом низу. Далее система фиксации дрона переходит в закрытое положения освобождая дрон и закрывая створки грогового окна. Дрон готов к выполнению полетного задания. Станция начинает заряд батареи на лепестке и готова отдать принятый груз через окно выдачи.
Это полное описание работы станции. Возможны различные другие варианты. К примеру без замены батареи если заряда достаточно или замена одной батареи с грузом или нет.
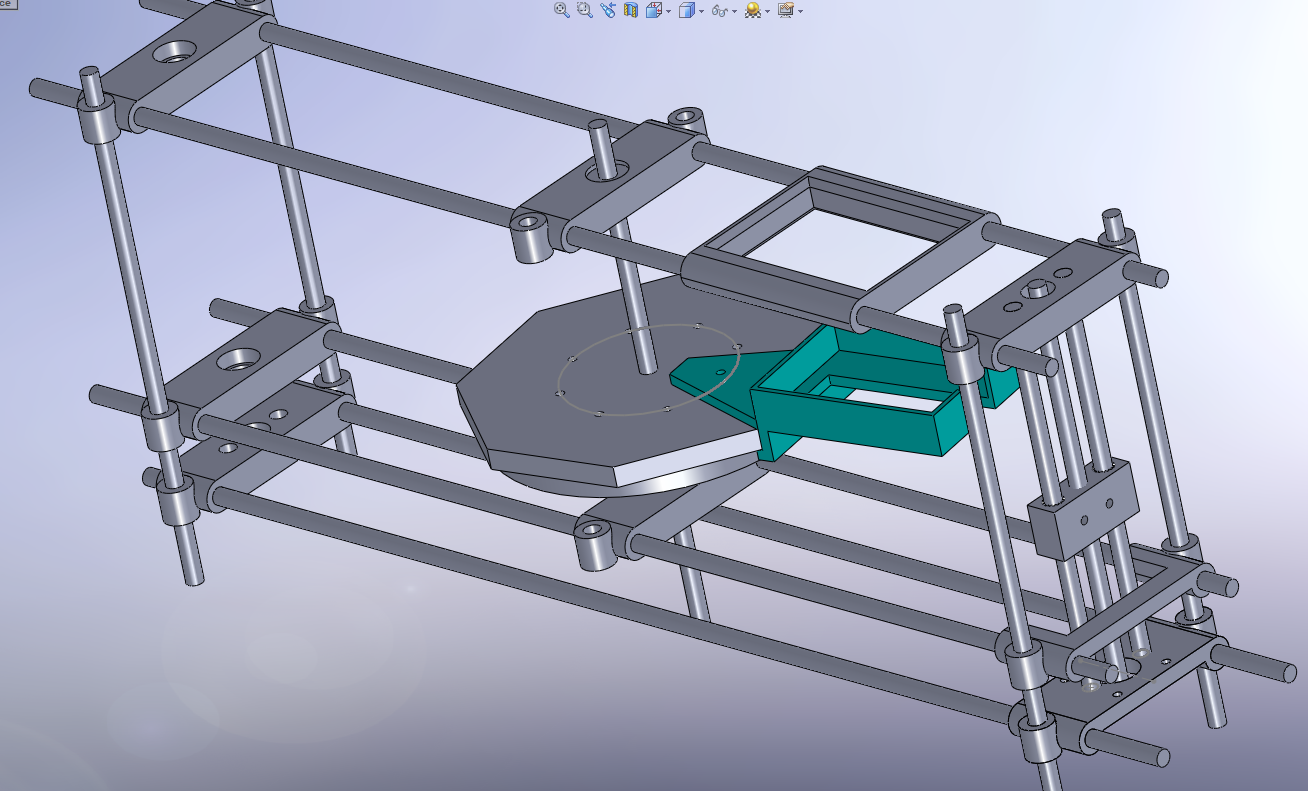
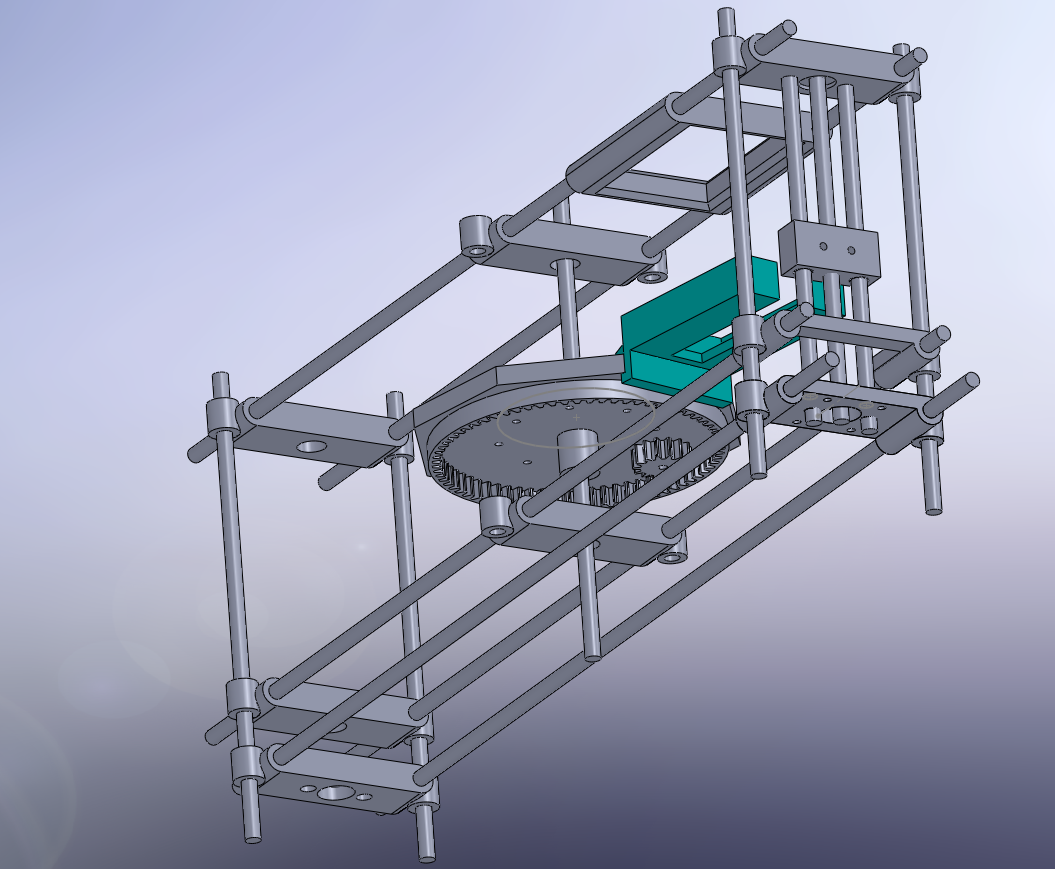
Для удобства сначала рассмотрим конструкцию рамы универсальной грузовой станции (УГС). Рама для данной модели сделана из 8 мм шпилек соеденненых между собой вставками. Вставки достаточно универсальны и могут использоваться в различных сочетаниях.
 Рама вид сверху
Рама вид сверху
 Рама вид снизу
Рама вид снизу
Для удобства в понимании конструкции рама показана без некоторых важных частей в виде приводов их шаговых двигателей, концевиков , лапы подъёмника, системы загрузки выгрузки, посадочной площадки с системой позиционирования и фиксации. Но прекрасно видно каретку подъемника и шестерню привода карусели.Так же можно заметить, что грузовой лепесток один причем не совсем итоговой формы. Видно также окно для правильной цент рации груза для подачи и приема груза с полетной площадки.
Система позиционирования квадрокоптера на посадочной площадке.
При посадке из за различных малоконтролируемых эффектов и точности позиционирования квадрокоптер не приземляется точно над приемно-загрузочным проемом. Для того что бы не было проблем при работе загрузки выгрузки груза и аккумулятора необходимо квадрокоптер точно позиционировать над проемом. Так же необходимо жестко зафиксировать квадрокоптер для проведения этих работ, что бы его не сдуло ветром и прочих внешних воздействий которые могут помешать работе. Для этого я предлагаю механизм, описанный с моем патенте. Механизм состоит из двух V образных направляющих которые крепятся на шасси квадрокоптера. Так же есть два фиксатора которые перемещаются по посадочной площадке. Все это можно увидеть на рисунках.
Когда квадрокоптер совершает посадку самое главное что бы фиксаторы находились внутри направляющих. После фиксаторы разводятся и доходят до угла в V образных направляющих. В крайнех точках положения фиксаторов квадрокоптер может находится только в одном правильном для работы положении. Так же если квадрокоптер очень тяжелый для того что бы он мог свободно перемещаться для выравнивания на площадке можно использовать небольшие колеса.
Команды для работы со станции.