Опорно-поворотные устройства
Для получения спутниковых снимков с помощью спутниковой тарелки нужно устройство, которое будет поворачивать её по направлению движения спутника. Введу того что готовое решение стоит слишком дорого решил такое сделать сам. Для этого решил использовать червячные редукторы на 40 и шаговые двигатели. Редукторы можно взять и по больше, но при этом растет их цена и обычно на нах нет возможности без проблем прикрутить шаговый двигатель. Шаговый двигатель хорош в том, что не надо запариваться с вычислением на сколько тарелка повернулась. То есть если все нормально, то просто задаешь угол на сколько надо повернутся, и он на столько повернётся. Лучше всего использовать связку NMRV040 с фланцем под nema34 и сам nema34. Передаточное число думаю, что лучше всего использовать 40-60. Надо помнить, что чем больше передаточное число, тем меньше зубья передаточного механизма, которые может срезать при сильной нагрузке. Также нужно учитывать что чем больше зуб тем больше будет люфт в редукторе который устранить будет проблематично из за особенности конструкции. Так же корпус редуктора сделан из алюминия и может быть разрушен при чрезмерных нагрузках. Если антенна стоит без защитного купола, то нужно принять меру по защите её от ветровых нагрузок. Самое лучшее решение — это силовой каркас из стали. где редукторы будут выполнять роль просто привода поворота.
На данные момент я сделал мот такую конструкцию


На втором снимке хорошо видно нижнюю площадку, которая будет приварена к швеллеру который будет играть роль опоры. Уголки которые прикручены винтами к швеллеру будут к этому швеллеру приварены.
Электронная схема управления привода будет довольна простая. Это контролёр в зависимости от того как хочется управлять по проводу или по wifi. Будет соответственно либо просто ардуино либо ESP8266. Важное условие что бы было не меньше 8 выводов для управления. Я буду использовать ESP8266 D1 mini. Два по три вывода идут на управление шаговых двигателей. И два для концевиков что бы найти начальную точку. Три вывода с контролера подключаются к драйверу типа TB6600. Это будет en(включение), dir(направление), step(движение). Сам драйвер подключается четырьмя проводами к шаговому двигателю. Главное правильно определить свою пару A и B. Концевика могут представлять собой простые выключатели, которые замыкаются, когда механизм находится в определённом положении.
Точность позиционирования зависит от редуктора чем передаточного числа редуктора и шага настроенного в драйвере. Минимальный шаг шагового двигателя это 1.8 градуса. Если у редуктора передаточное число 40, то соответственно максимальная точность позиционирования будет 0.045 градуса что более чем достаточно всех возможных наблюдений. Тут становится проблема изначальной точной установки которой добиться не получится.
Для получения спутниковых снимков я буду использовать программу dumpsys которая полностью удовлетворяет моим требованием делает хорошую обработку и дает готовые привязанные снимки. Так же она может управлять поворотным устройством. Для получения на сколько должна быть повернута антенна используется питоновский скрипт в качестве сервера. Который уже отправляет запросы непосредственно на котроллер устройства.
Собрал на одной доске все основное управление. выглядит это так. В последствии будут добавлены пару второстепенных элементов.
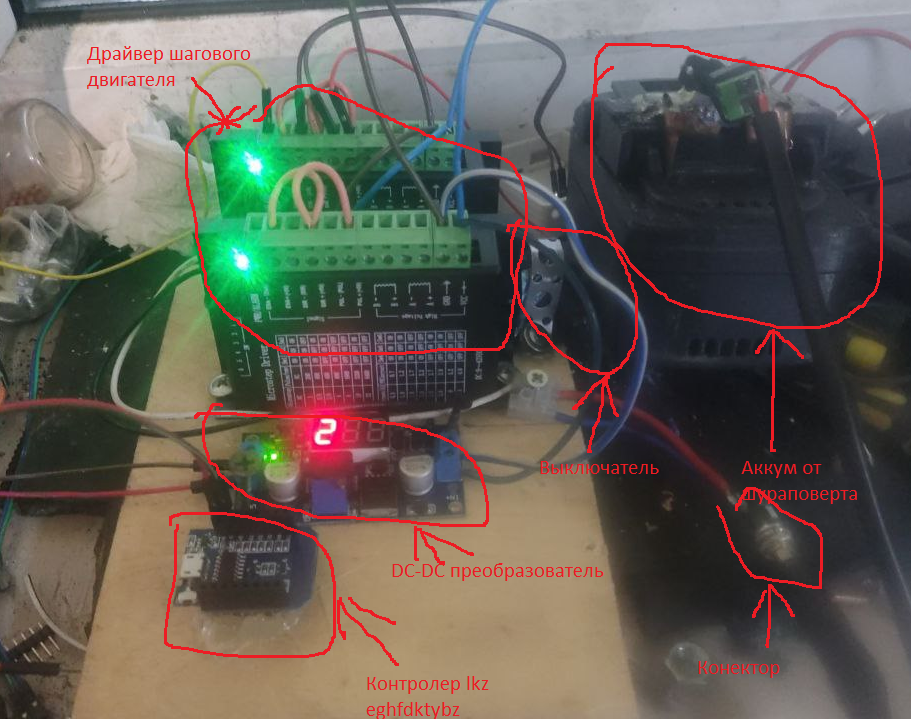
Питание схемы пока осуществляется с помощью аккумулятора. Так же может осуществляется с помощью блока питания от ноутбука. Так же есть достаточно мощный DC-DC на 5 вольт преобразователь которого хватит для питания приемника и одноплатового компьютера типа малинки-апельсинки. Тогда в принципе не каких проводов не будет и не будет опасности перекрутки.
Непосредственное схему подключение к контролеру выложу позже.